
Extracting an image of the goal in each video frame
My initial working assumption was that I could exclude the part of finding the exact location of the goal/canvas in each frame as
- it is of secondary importance to the main problem of approximating the hit time,
- surely, it can be done given that one spends time on the problem, and
- I could use a manually positioned rectangular cropping area for each round of shots as both canvas and camera is stationary for each round, thus exluding most background interference.
Although (1) and (2) still hold, (3) barely even held for indoor sessions where most parameters were fixed for the recording duration and definitely does not hold for uncontrolled outdoor sessions. An underlying idea of using a canvas is to provide something flexible and portable for players, which comes with the side effect of less rigidity. On the other hand, few materials hold up to being hit by a hockey puck in full speed (even expensive match-quality hockey goals become dented) so non-rigid materials and mounting methods is also a way of handling this.
The problem, then, is to find a transformation matrix (a homography) that maps coordinates in the below canvas illustration to coordinates in an actual video frame.
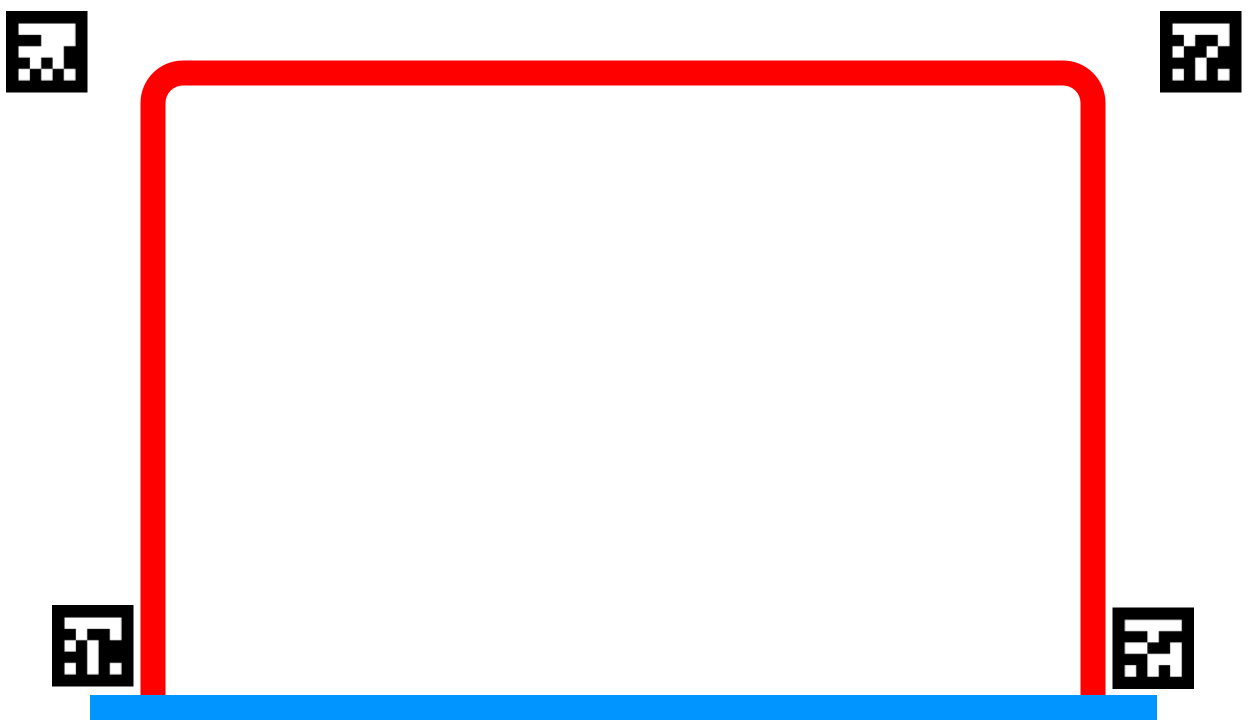
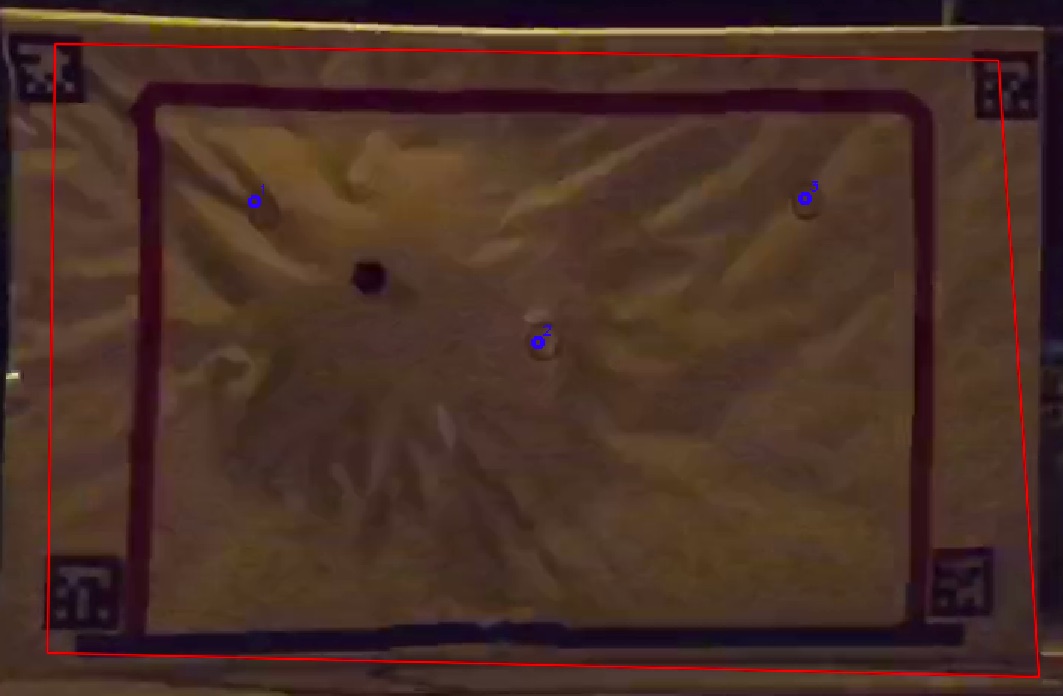
In short, I use SIFT feature detection on both illustration and video frame to find keypoints that can be used to match the two. I then use a brute force matcher to find the set of most similar keypoints, which then is used to construct a matching homography matrix using RANSAC. Then this is used to construct a mask representing the corners of the canvas in order to extract only the part of the canvas representing the goal, with very little background visible.
The problem, like so often in computer vision, is that this does not work perfectly every time. A small fraction of the frames (out of thousands) has intermittent homographies suddenly jumping to something like the below (and then back again).

One solution could be to use the average corner coordinates over a number of frames in order to even out the effects of these bad homographies. However, what if one frame was really bad, like shown below? Then instead of having one bad set of corner coordinates, all coordinates based on an average that included the bad frame would be poor.
A better solution seems be to use something like Kalman filtering for each corner, adjusting the parameters so the coordinates would adjust slowly and big jumps would be treated as sensor errors. So I implemented this and let the kalman filtering run for six frames before using the homography to capture any example. I also reset the kalman filter after having processed each shot since the canvas could potentially be repositioned by the player in between each shot.
At first, this appeared to be a working fix but then I noticed that the initial frame was bad for a round (see below). This caused the starting points to be off and even though the Kalman filter slowly adjusted itself to a good representation of the canvas corners, it took much more time than the six frames I had alloted. Why not let it run 60 frames? Because calculating the homography based on SIFT and brute force matching is a choice of precision rather than processing time.

At this point, I adjusted my assumptions and instead of letting every shot being independently analyzed and use the same Kalman filter over the whole round of shots. Doubling the number of prior frames used should be enough to adjust to reasonable changes in positions of tripod and canvas between shots. As long as the first homography in a whole session is okay, the rest should be too.
One might imagine that using more prior shots would be better, right? Not entirely. One of the prior frames resulted in the below homography, from which the kalman filter did not recover during the shot. A very similar problem to the one discussed in relation to using the average over several frames. In some sense this brings the whole problem back to square one.

In the long run, I probably need to experimentally find out what a reasonable homography is. That is, for example, look into the range of plane normals that can be expected given a mobile camera on a tripod, the canvas level and hanging some distance off the ground.
For now, some of the bad cases, like the one above, can be handled by checking that the corners resulting from the transformation are ordered properly (the left corners having smaller x-coordinates than the right corners, etc.) Also the ratio of side lengths should be within some margin. This does not completely fix the problem but results in far fewer erroneous goal corners.
Edit: I also managed to improve things by adjusting the SIFT parameters for the stencil based on it being an illustration. This is also something I need to look into more as it is not obvious what an optimal set of parameters look like for this application. Also, at this moment I can only visually inspect the images – and there are thousands.
Edit 2: The processing time for all session excepth the eleventh took 13 hours and 12 minutes. The result was 3441 examples of the puck just having hit the canvas and 3519 examples of the canvas not yet having been hit. Based on visual inspection, very few examples are based on a non-optimal homography and none of the examples are invalid. The total, just shy of 7000 examples, should be enough data for now.