
2D perspective projection could introduce systematic error
If the camera is placed arbitrarily but always to the left, then approximating the hit position as the centroid of the puck could introduce small but consistent skewing to the right.
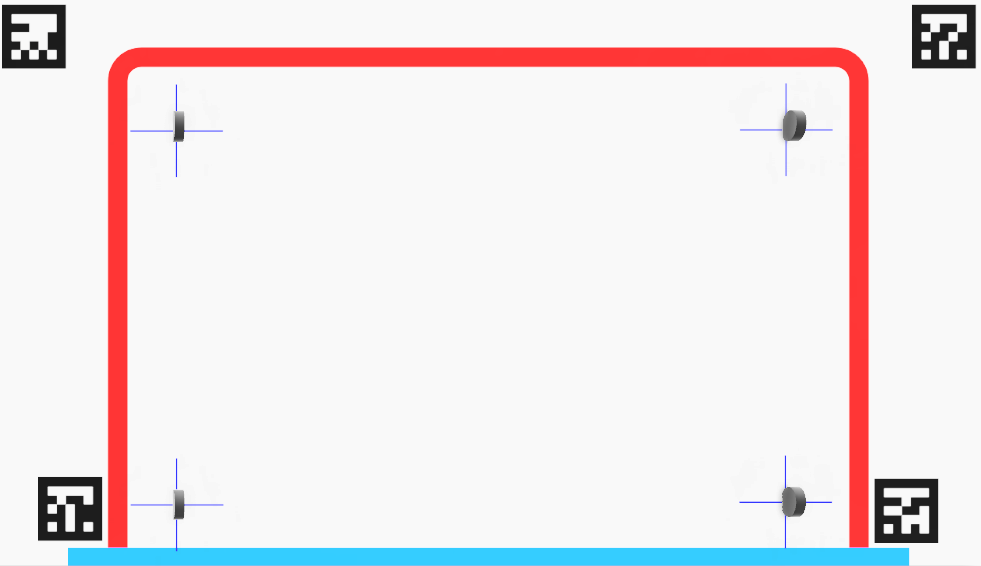
From the above figure, it can be seen that the camera perspective and 2D projection make more of the flat sides of the pucks on the right visible, causing the 2D centroid to move to the right. On the left side, due to the camera angle being more head-on, the centroid will be a better approximation to the actual position. Note also that the centroid of upper pucks also skew up due to the camera being placed low.
It should be mentioned that the pucks usually has some spin and will hits the canvas less clean than in the above case. If it hits broad side first, the skewing is much less pronounced.
The effect can also be seen in the following figure

One could argue that pucks hitting the canvas on the right comes in at an angle, assuming the player is centered, and thus the puck would have moved more to the right if the canvas had not stopped it early. However, assuming this is a valid argument, the reverse would hold for the left side and then the centroid would consistently skew to the right.
The best option is probably to alternate sides for the camera in order to average it out over time.

